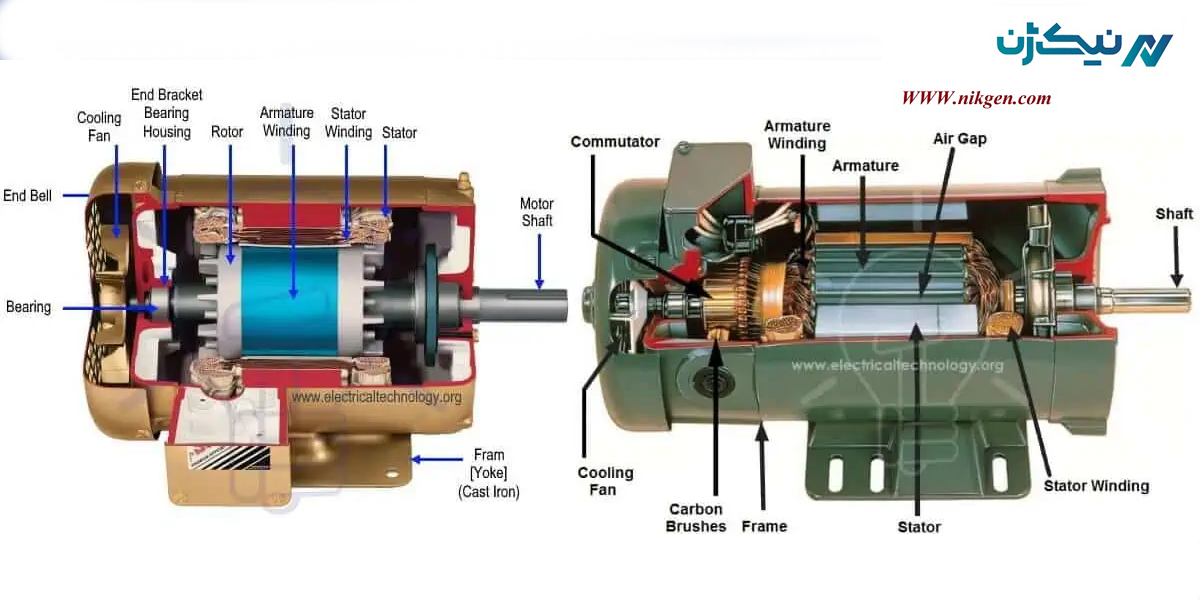
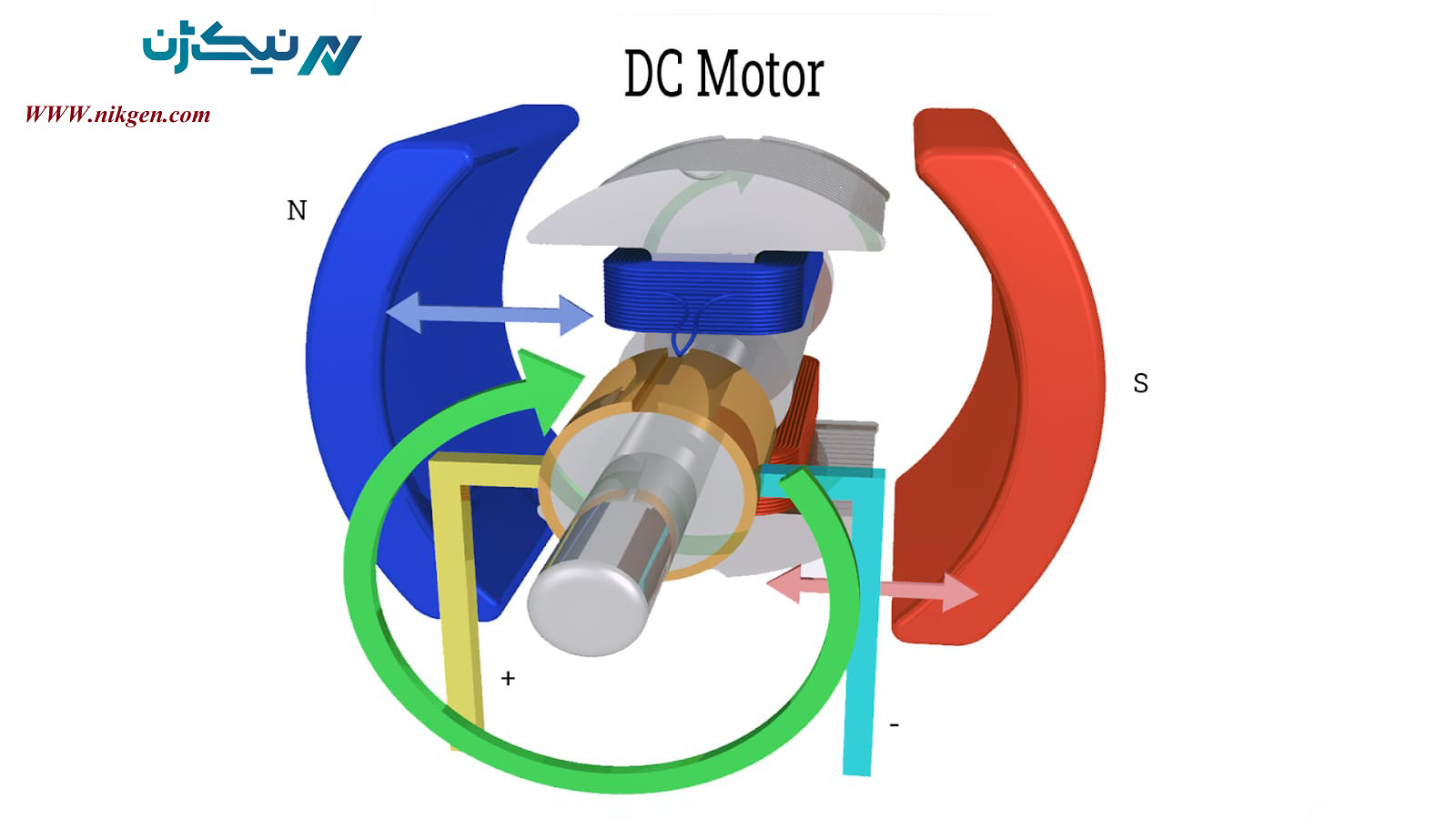
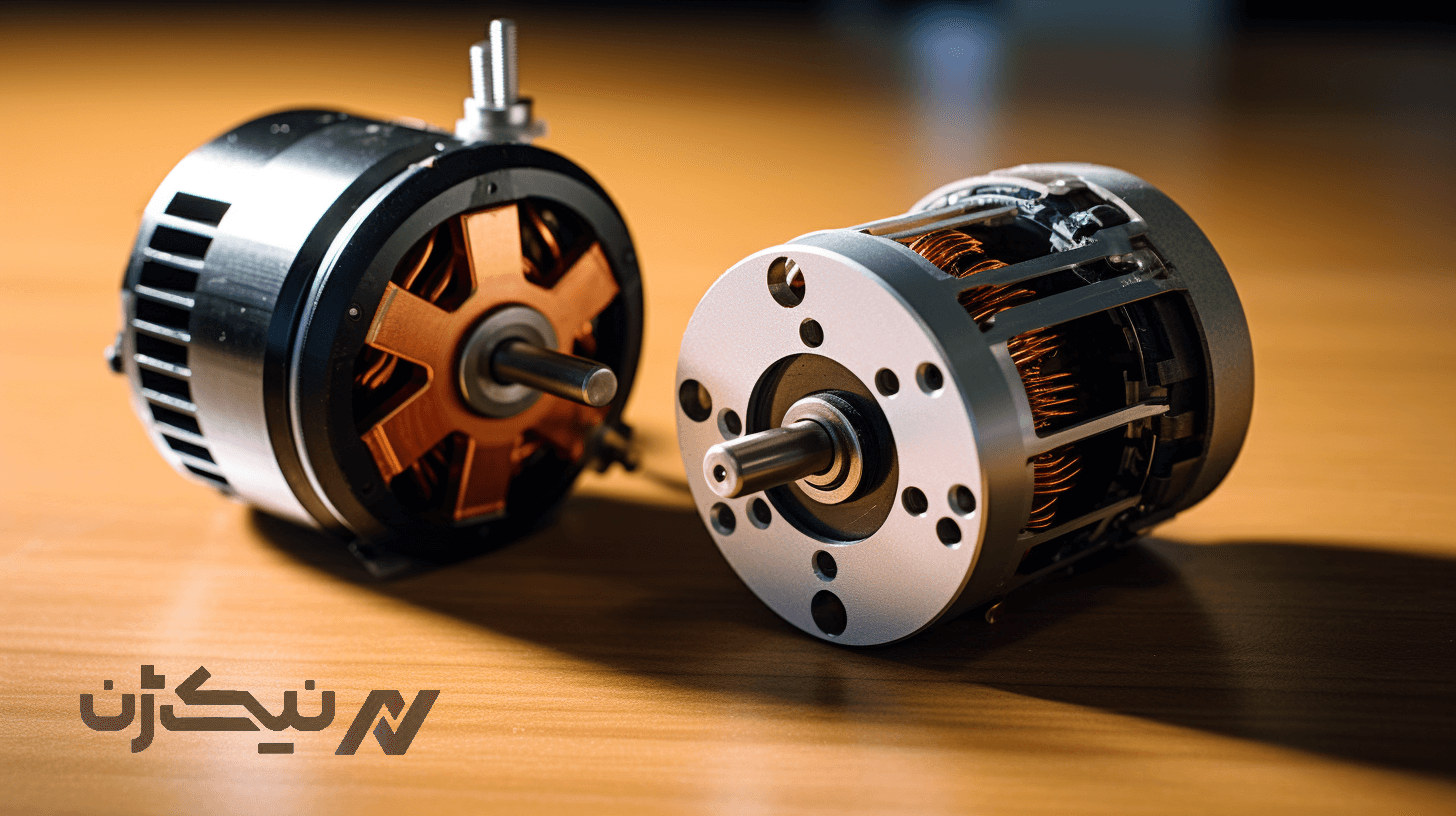
- الکتروموتور
نوع الکتروپمپ
-
خانگی 
-
سانتریفیوژ 
-
کف کش 
-
لجن کش 
-
استخری 
-
موتور پمپ 
-
کارواش 
-
باد 
-
دیافراگمی 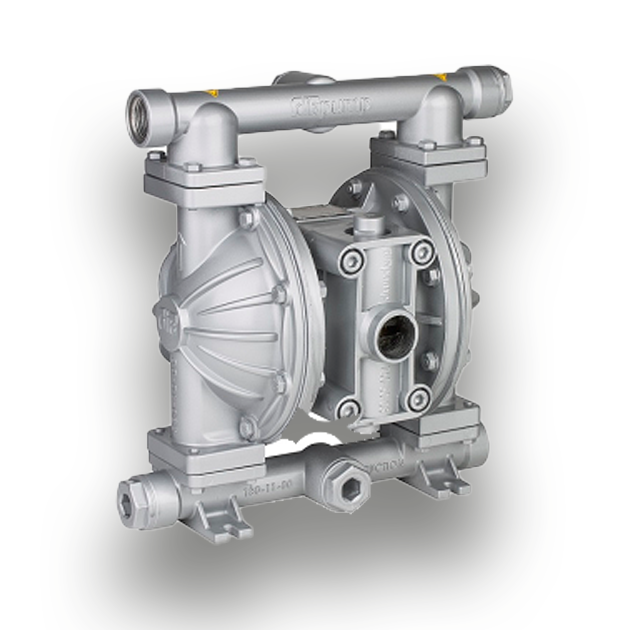
-
شناور 
-
وکیوم 
-
روعن داغ 
-
سیرکولاتور 
شرکت ایرانی
-
پمپیران Pumpiran 
-
آبروان Abravan 
-
موتوژن Motogen 
-
الکتروژن Electrogen 
-
آبارا Abara 
-
رایان Rayan 
-
دیزل ساز Dieselsaz 
-
ایران تولید IranTolid 
-
سهند تبریز Sahand Tabriz 
-
راد پمپ Rad Pump 
-
نوید موتور Navid Motor 
-
اسپیکو SPICO 
-
ارس پمپ Aras Pump 
-
توان تک TavanTak 
شرکت خارجی
-
لئو Leo 
-
پنتاکس Pentax 
-
سیستما SISTEMA 
-
ابارا Ebara 
-
شیمجه SHIMGE 
-
استریم Stream 
-
پدرولو Pedrollo 
-
سیلند Sealand 
-
آکواسترانگ Aquastrong 
-
ایکار Icar 
-
ویلو Wilo 
-
کالمو Calmo 
|
|
|
|
|---|
نوع گیربکس
-
هلیکال Helical 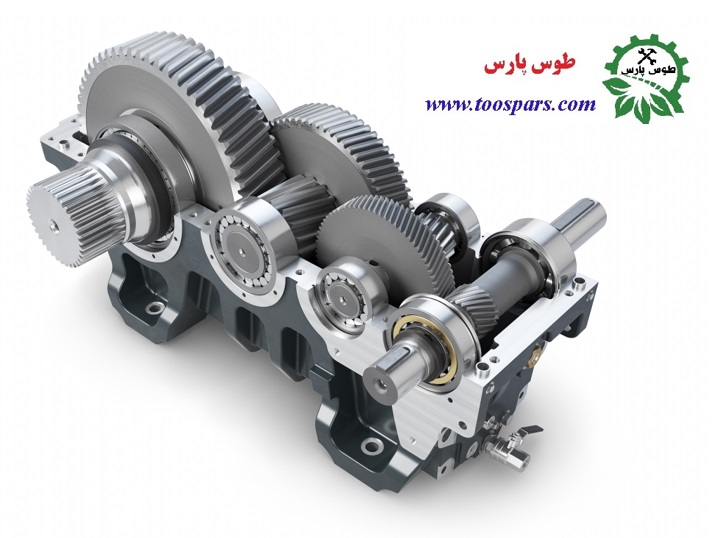
-
حلزونی Spiral 
-
خورشیدی Planetary 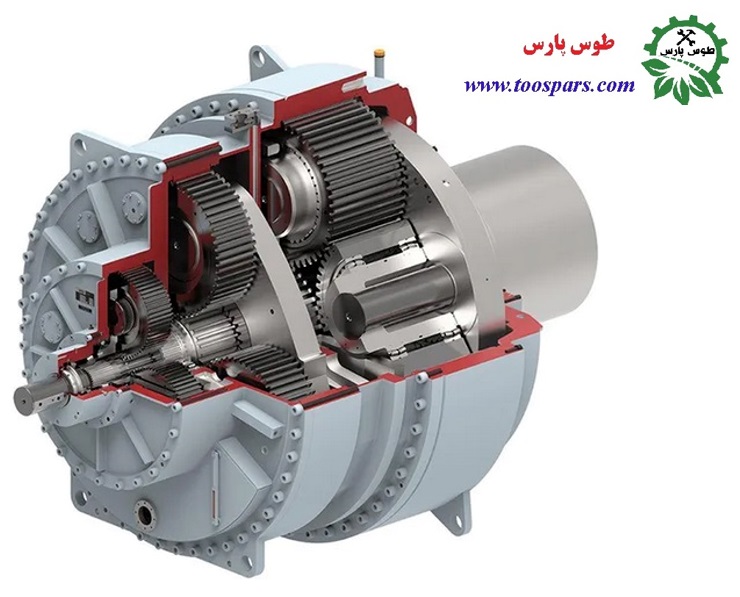
-
سایکلو Cyclo 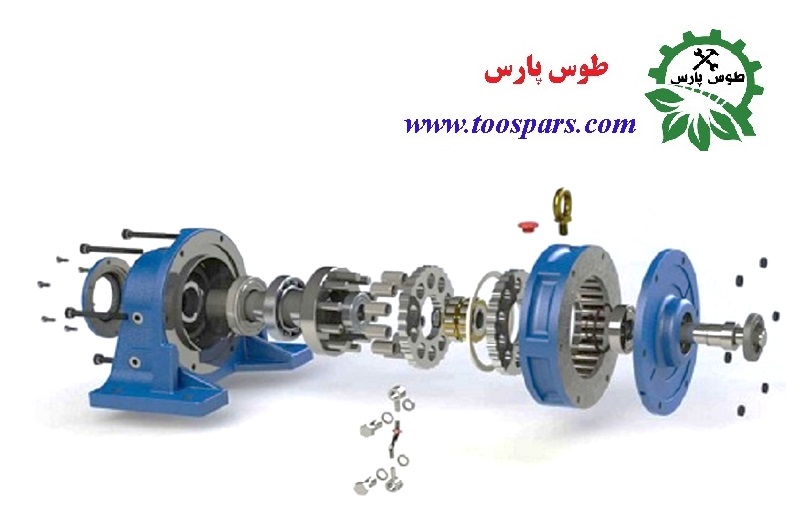
-
اکسترودر extruder 
-
واریاتور variable 
-
آسانسوری elevator 
-
هلیکال موازی Paralel Helical 
-
خاص صنعتی Industrial 
شرکت ایرانی
-
شاکرین اصفهان 
-
سهند دور اصفهان 
-
شریف اصفهان 
-
پارس گرجی 
-
رهنما 
-
شهباز 
-
رضایت 
-
رستمی 
-
پولادین پارت 
-
کاردان 
-
ترنج 
-
آسیا 
شرکت خارجی
-
آلمان Sew 
-
چینی China 
-
ایلماز ترکیه Yilmaz 
-
ازدمیر ترکیه Ozdemir 
-
پی جی آر ترکیه PGR 
-
ایماک ترکیه iMAK 
-
رجیانا ایتالیا Reggiana 
-
فلندر آلمان Flender 
|
|
|
|
|---|